Entwicklungsprojekt zu Werkzeugmaschinen und Handhabungstechnik
Ziel bei STEP ist es, eine Werkzeugmaschine zu entwickeln. So konnte ich in diesem Projekt das theoretische Wissen aus der Vorlesung mit einer kleinen Gruppe von 5 Studenten direkt anwenden. Außerdem gibt es zusätzlich ein Entwicklungsauftrag von einem Industriepartner. In meinem Fall war das Heller, einer der größten Hersteller für Werkzeugmaschinen und Fertigungssysteme.

Richtig toll fand ich, dass sich die Ingenieure von Heller sehr viel Zeit für uns genommen und viel mit uns diskutiert haben. So konnte ich einen sehr guten Einblick in das Arbeitsleben eines Werkzeugmaschinenherstellers gewinnen.
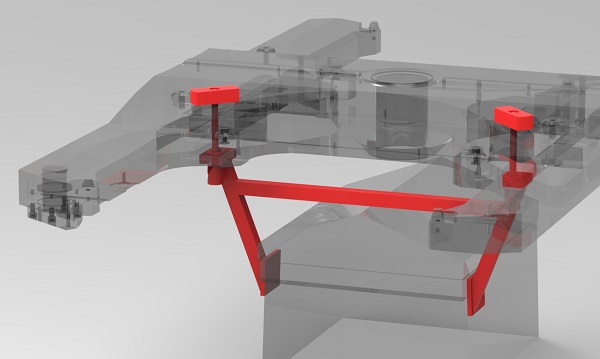
Verriegelungsmechanismus
Auftrag von Heller war es, ein Verriegelungsmechanismus für den Palettenwechsler zu entwickeln. Dies soll die Sicherheit der Maschine erhöhen.
Um realitätsnahe Rahmenbedingungen zu gewährleisten, haben wir uns für folgendes Vorgehen entschieden: VDI 2221 - Methodik zum Entwickeln und Konstruieren technischer Systeme und Produkte.
Um die Anforderungen zu klären haben wir ein komplettes Lastenheft erstellt und die Funktionsstruktur aufgezeigt. Die Ausarbeitung des Verriegelungsmechanismus erfolgte dann in drei Schritten. Die prinzipiellen Lösungen und die Vorentwürfe haben wir jeweils in einem Meilenstein vorgestellt und in einer Diskussion zusammen mit Heller das weitere Vorgehen beschlossen. Im letzten Meilenstein haben wir abschließend zwei ausgearbeitete Konstruktionen präsentiert.
 Bearbeitungszentrum
Bearbeitungszentrum
Vorgabe zur Werkzeugmaschine war die Entwicklung eines 4-Achs Fräszentrums mit dem Palettenwechsler von Heller.
Als Aufbauschema haben wir uns für ein Winkelgestell mit Fahrständer entschieden. Neben den drei linearen Achsen kann der Werkstückschlitten um die y-Achse gedreht werden. Dies ermöglicht eine Bearbeitung des Werkstücks von vier Seiten.
Danach haben wir alle Komponenten ausgelegt und berechnet. Im einzelnen sind das die Führungen, die Kugelgewindetriebe, die Antriebsmotoren und die Hauptspindel.
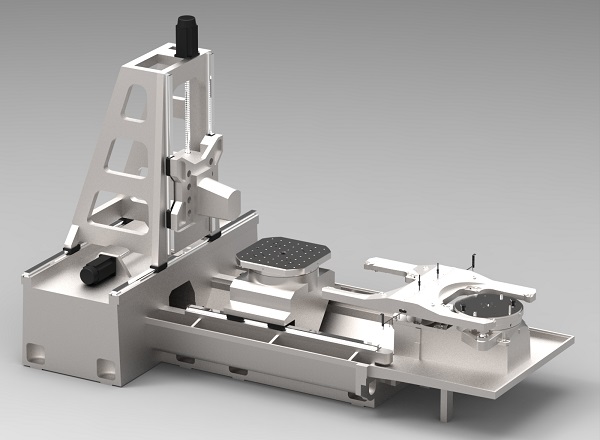
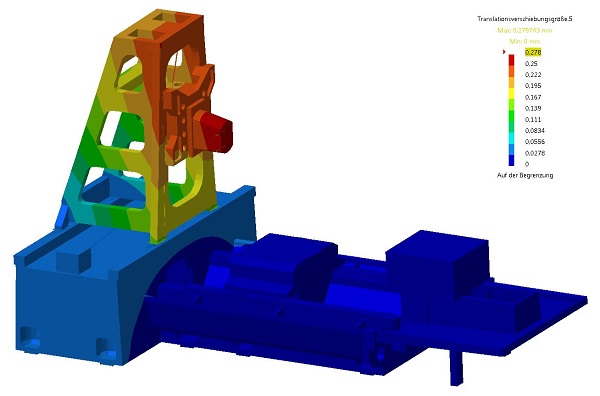
Die fertige Fräsmaschine haben wir anschließend mit CATIA simuliert. Ergebnis der statischen Simulation ist die Verschiebung, mit der die Steifigkeit berechnet werden kann. In der dynamischen Simulation werden die Eigenfrequenzen ermittelt.
Vielen Dank an Jörg und Quirin für die intensive Betreuung am Institut (wbk)!
letzte Änderung: 05.03.2014