CNC Fräse - A3979 Board
Da die TB6560 Treiberplatine, wie bereits geschrieben, zahlreiche Schwächen aufweist, habe nach einer Verbesserung gesucht. Zunächst habe ich überlegt, das Board an sich zu ändern. Aber da die verwendete Elektronik nicht wirklich dem neusten Schrei entspricht, habe ich das Internet nach Alternativen befragt. Schließlich habe ich mich für den
Allegro A3979 entschieden.
Der A3979 ist ein bipolarer Schrittmotor Treiber. Er wird, wie die TB6560 Treiber, mit Schritt- und Richtungssignalen gesteuert und die MOSFETs sind bereits integriert. Mit 2,5A ist er der stärkste Treiber im Allegro Portfolio. Es gibt einen sehr ähnlichen Chip von Texas Instruments mit dem Namen DRV8811.
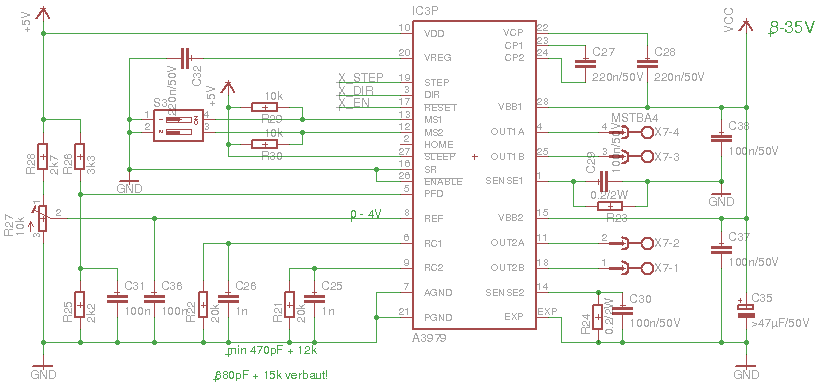
Bei der Beschaltung des A3979 habe ich mich weitest gehend an das Datenblatt gehalten. Die Schrittteilung (voll bis 1/16) erfolgt per Dipschalter. Mit einem Poti kann die Stromstärke stufenlos eingestellt werden. Zur Aktivierung verwende ich den Reset Pin. Home, sleep, SR und enable werden nicht verwendet bzw. sind fest verdrahtet.
So sieht die Beschaltung für ein Kanal / ein Schrittmotor aus. Ich habe sehr ähnliche Schaltungen im Internet gefunden. Also kein Risiko.
Als Anschlussstecker für die Schrittmotoren verwende ich den Wannenstecker AKL 249 (AKL 230-04 Reichelt). Diese sind einfach super praktisch und sie sind baugleich zu den Steckern auf der TB6560 Platine.
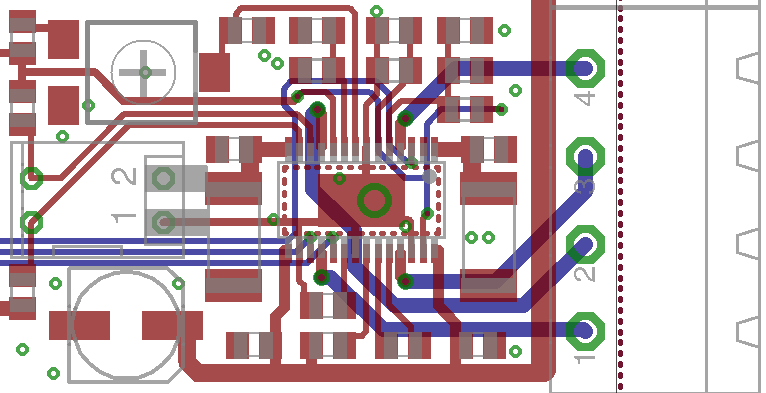
Ich habe es geschafft beim Layout alle Teile hinter dem Stecker zu platzieren. So können beliebig viele Kanäle auf einer Platine nebeneinander angereiht werden.
Meine Fräsmaschine hat 3 Achsen. Also habe ich auf meinem A3979 Board 3 Treiber samt Beschaltung. Dazu kommt ein Spannungseingang und ein Festspannungsregler für die 5V Signal Spannung. Auch beim Signaleingang habe ich mich dafür entschieden, den Sub-D25 Stecker mit der gleichen Pin Belegung zur TB6560 Platine zu verwenden. Somit kann ich die alte Treiberplatine ohne jegliche Änderung an der Fräse durch mein A3979 Board ersetzen.
Der Signaleingang ist sauber mit Optokopplern getrennt. Zusätzlich sind die Signale auf einer Pinleiste heraus geführt. Ich hatte dafür noch Platz auf der Platine und wollte einen Anschluss für eine Steuerung per Mikrocontroller schaffen. Auf 230V Relais habe ich verzichtet, da ich diese bis jetzt auch nicht verwende.

Der A3979 hat auf der Unterseite ein thermal pad. Das sollte unbedingt mit angelötet werden, damit der Chip nicht zu warm wird. Eigentlich passiert das in einem Reflow Ofen, den habe ich aber nicht. Ich habe einfach ein großes Via direkt unter dem Treiber platziert, um das thermal pad durch die Platine hindurch anlöten zu können. Das hat funktioniert.
Zum Vergleich: alt gegen neu

Der erste Test meines A3979 Boards war leider nur teilweise erfolgreich. Es hat alles genau so funktioniert wie vorher mit der TB6560 Platine. Aber leider halt auch nicht besser.
Die Schrittmotoren pfeifen genau so nervig wie vorher. Die Vorschub Geschwindigkeit konnte ich von 150 mm/min gerade mal auf 160 mm/min ohne Schrittverluste erhöhen. Dann habe ich von halb auf 1/4 Schritt umgestellt. An der maximal Geschwindigkeit hat sich dabei nichts geändert, aber gefühlsmäßig hat sich das Laufverhalten der Schrittmotoren gebessert.
Der A3979 kann 2,5A und auf meinen Schrittmotoren steht 1A. Ich habe das Poti auf meiner Platine auf eine Referenz Spannung von 1,2V eingestellt, das entspricht laut Datenblatt 0,75A Strom. Mit meinem Multimeter habe ich an einer Wicklung aber nur maximal 100mA gemessen. Also habe ich angefangen mit der Strom Einstellung zu spielen. Egal ob mehr oder weniger, der maximale Vorschub hat sich damit nicht merklich geändert. Allerdings werden bei zu viel Strom die Schrittmotoren sehr heiß.
Dann ist mein Verdacht auf die Optokoppler gefallen. Die können nicht unendlich schnell schalten. Also habe ich ein Oszilloskop an den Ausgang eines Optokopplers angeschlossen.
An dem Ergebnis sieht man, dass meine maximale Taktfrequenz von 2kHz nicht zu hoch ist. Ich denke bis zu 10kHz werden von den Optokopplern noch sauber geschalten.

An der Elektronik konnte ich also keine Fehler finden. Die Mechanik birgt natürlich enormes Verbesserungspotential aber momentan ist sie eben, wie sie ist. Dann sind da noch die Schrittmotoren. Meine haben 6 Anschlusskabel, je 3 pro Wicklung. Man hat damit die Möglichkeit entweder die gesamte oder nur die halbe Wicklung zu verwenden. Das eine verspricht mehr Drehmoment, das andere mehr Geschwindigkeit.

Ich habe die high torque Verkabelung verwendet, weil meine Fräse ja ordentlich Kraft haben soll. Ich konnte mir nicht vorstellen, dass die andere Verkabelung besser funktioniert. Habs aber dann doch spaßeshalber ausprobiert. Und siehe da, oh Wunder, die Vorschub Geschwindigkeit lies sich auf 400 mm/min erhöhen und damit mehr als verdoppeln!
Ob sich das Drehmoment entsprechend verringert hat, kann ich nicht messen. Dank der hohen Übersetzung hat die Fräse immer noch sehr viel Power. Um sicher zu gehen, habe ich schließlich eine maximale Geschwindigkeit von 350 mm/min auf allen 3 Achsen eingestellt. Bis heute hatte ich keinen einzigen Schrittverlust, weder im Eilgang, noch bei der Bearbeitung.
Fazit
Die Mechanik der Fräse und die Schrittmotoren sind schon sehr bescheiden. Außerdem habe ich nachträglich einige Einstellungen getestet und geändert. Somit kann ich mein A3979 Board nicht 1:1 mit der TB6560 Platine vergleichen.
So viel kann ich aber sagen: Ich bin mit meinem Board sehr zufrieden. Es läuft seit geraumer Zeit ohne Probleme. Die A3979 Treiber werden überhaupt nicht warm. Der Festspannungsregelt allerdings schon. Dort empfehle ich den Einsatz eines Stepdown (z.B. LM2675).
Im Gegensatz zum TB6560 besitzt meine Platine eine ordentliche galvanische Trennung und der Strom kann stufenlos eingestellt werden.
 Daten - Bilder - Zeugs
Daten - Bilder - Zeugs
letzte Änderung: 29.05.2014